 |
Obrázek/Figure 1. Cometary nuclei imaged by spacecrafts and planetary radars.
Collage of all cometary nuclei imaged by spacecrafts and planetary radars. Resolution is 25 meters per pixel.
In case of comet being imaged by multiple spacecrafts/radars, image from the underlined source is used.
Collage credit: Daniel Macháček. Individual credits for source images are directly in the collage.
|
Je tomu již přes dvě léta, co se odmlčela doposud jediná sonda obíhající kometu, evropská
Rosetta (ESA), mise mající za úkol podrobný průzkum komety
67P/Čurjumov-Gerasimenko (dále jen zkráceně 67P).
Dva roky je dost dlouhá doba na to, aby se člověk mohl ohlédnout zpátky a zhodnotit z odstupu alespoň některé aspekty mise Rosetty. Protože shrnout celou misi Rosetty u komety 67P by vydalo na slušnou publikaci, zaměřím se zde jen na úzkou oblast snímkování komety a jejího povrchu. A i v této oblasti pořídila Rosetta takové množství dat, že se zaměřím jen na pár oblastí zájmu.
Sonda Rosetta má na palubě hned několik kamer a skenerů, které pořizovaly snímky u komety 67P. Jistým překvapením může být, že nejslavnějšími se staly navigační kamery NAVCAM, přestože se vůbec nejednalo o hlavní kamery mise. Těmi byly širokoúhlá a úzkoúhlá kamera přístroje
OSIRIS. I přes obrovský zájem fanoušků kosmonautiky o tuto misi byl bohužel tým těchto kamer zpočátku natolik skoupý na publikování snímků, že nakonec organizace ESA přistoupila k alternativní variantě, spočívající v pravidelném publikování snímků z kamer NAVCAM. Proto je také stále většina snímků komety 67P, vyhledatelných přes Google, pořízená právě kamerami NAVCAM.
Ve vědeckém světě je ale už dnes standardem všechna pořízená data po určitém časovém intervalu, vyhrazeném pro vědeckou analýzu a přípravu (kalibraci) dat, zveřejnit a proto jsou nyní už k dispozici i snímky z kamer OSIRIS a to včetně osudového přistání Rosetty 30. září na kometu 67P, které zakončilo celou misi. Navíc tým kamer OSIRIS
zveřejnil potěšující zprávu, že snímky teď spadají pod licenci
Creative Commons, což zdaleka nebývalo u misí ESA zvykem.
Přístroj OSIRIS má oproti kamerám NAVCAM několik podstatných výhod.
Používá čipy s vyšším rozlišením (4 Mpix vs 1 Mpix), úzkoúhlá kamera rozliší menší detaily ze stejné vzdálenosti, snímky mají vyšší kvalitu díky řádné kalibraci a hlavně obě jeho kamery jsou vybaveny sadou filtrů, které umožňují vytvořit barevné snímky komety.
A především na barevné snímky komety 67P se v následující minisérii článků zaměříme.
Ovšem na začátek uděláme malou odbočku a podíváme se do historie snímkování kometárních jader, abychom tak náležitě ocenili snímky, kterými nás zásobovala Rosetta během svého více než 2 roky trvajícího pobytu u komety 67P.
V několika posledních desetiletích jsme učinili značný pokrok ve studiu kometárních jader, což je dobře patrné z obrázku 1, který obsahuje všechny komety, u nichž se podařilo přímo zobrazit jádro a to ve stejném měřítku při rozlišení ~25 metrů na pixel. Sondy navštívily celkem osm komet a šest z nich se podařilo vyfotit. Jako bonus se navíc podařilo z velké vzdálenosti (138 000 km) vyfotit kometu
C/2013 A1 Siding Spring, když prolétala okolo Marsu. Za výhodných podmínek je také možné zobrazit jádra blízkých komet pomocí výkonných planetárních radarů observatoří v Arecibu a Goldstone, i když takové radarové obrazy nejsou jednoduše interpretovatelné jako v případě klasických snímků (viz třeba výborný článek
How radio telescopes get "images" of asteroids od Emily Lakdawally) a proto se jimi zde nebudeme dále zabývat.
 |
Obrázek/Figure 2. Comet Halley from the VeGa-2 spacecraft.
Best image - t11190 (Abergel et al 1997) of the 1P/Halley comet taken by TVS camera onboard
Soviet VeGa-2 spacecraft.
It was taken 9.3.1986 at the UTC time 7:19:58 from distance 8030 km.
Image has contrast enhanced to show subtle details and it was resampled to 100 m/pix resolution
(original resolution was 120×160 m/pix).
Credit: Russian Academy of Sciences / KFKI / Daniel Macháček.
|
První sondou, která navštívila nějakou kometu byla americká
ICE, která proletěla 11. září 1985 ve vzdálenosti 7800 km okolo komety
21P/Giacobini-Zinner 1. Tato sonda ale bohužel neměla na palubě žádnou kameru.
O rok později došlo k setkání hned celé flotily pozemských sond s Halleyovou kometou (
1P/Halley). Zatímco dvě japonské sondy
Sakigake a
Suisei se zaměřily hlavně výzkum prostředí okolo komety, trojice odvážlivců se vydala na průzkum jádra a jeho nejbližšího okolí. Jednalo se o dvě sovětské VeGy, které již měly za sebou úspěšný průzkum Venuše, a evropskou sondu Giotto (ESA). Všechny byly vybaveny barevnými kamerami, které měly, teoreticky, pořídit relativně kvalitní záběry jádra.
6. března 1986 prolétla jako první okolo komety
VeGa-1 ve vzdálenosti 8890 km. Snímky z kamerového systému TVS měly nevalnou kvalitu, což bylo zprvu sváděno na velké množství prachu v okolí jádra, ale později se přišlo na to, že čip kamery je posunut o 0,5 milimetru od ohniskové roviny optiky kamery a to vedlo k výraznému rozostření snímků (Dimarellis
et al 1989).
O tři dny později ji následovala
VeGa-2 průletem ve vzdálenosti 8030 km. Snímky nyní byly ostré, ale vyskytly se problémy jiného rázu. První z nich spočíval ve snížené kvalitě kvantizace dat ze 7-mi na 5 bitů na pixel, což v praxi znamená jen max. 32 úrovní šedi na pixel a přeexponování většiny snímků (Thomas 2004). Druhý se týkal systému automatického sledování cíle (Abergel
et al 1987).
Protože všechna data byla přenášena v reálném čase pro případ, že by sonda průlet nepřežila a každý přenos dat z tak velké vzdálenosti je omezený, systém sond VeGa posílal na zemi jen malé výřezy o velikosti 128×128 pixelů (z celkových 512×512), obsahující jen jádro komety. U rozmazaných snímků VeGy-1 tento systém fungoval dokonale, ale u VeGy-2 selhala automatická navigace a záložní systém spolu s mikroprocesorem řídícím výběr výřezů měl problém správně identifikovat jádro komety a tak bylo na poslední chvíli rozhodnuto posílat na zemi celé snímky o rozměru 512×512 pixelů. Tím se výrazně snížilo množství pořízených snímků, které byly navíc přeexponované díky již zmíněnému problému s kvantizací dat. Nakonec byly mezi přenesenými snímky z nejbližšího průletu jen dva nepřeexponované! Není tedy divu, že barevné snímky z VeGy nakonec nikdo nezveřejnil.
Lepší ze dvou nepřeexponovaných snímků je na obrázku 2 (Abergel
et al 1997). Jedná se o snímek t11190, který byl pořízen s rozlišením 120×160 metrů na pixel (čip měl obdélníkové pixely!) a zde je zvětšen na 100 metrů na pixel.
 |
Obrázek/Figure 3. Comet Halley from the Giotto spacecraft.
Color mosaic of few tenths of images of the 1P/Halley comet taken by HMC camera onboard Giotto spacecraft (ESA).
Source images were taken between 13. and 14. March 1986 through red, blue and clear filters (Keller et al 1992).
Last image was taken at distance 1936 km from the comet.
All source images were resampled to 50 m/pix resolution.
Credit: ESA / MPS (H. U. Keller) / Daniel Macháček.
|
Poslední z trojice byla evropská sonda
Giotto, která prolétla okolo komety 14. března. Na palubě měla netradiční kameru HMC (Halley Multicolor Camera), která byla schopná se navádět automaticky na jádro komety nezávisle na rotací stabilizované sondě a pořizovat snímky během celého průletu, včetně nejbližšího přiblížení jen na 605 km od komety a to i barevně v rychlém sledu za sebou. Sonda samotná byla zepředu chráněna kevlarovým štítem, protože se očekávala dost drsná jízda skrz komu komety.
Toto očekávání se bohužel bohatě naplnilo, když 15 sekund před nejbližším přiblížením dostala sonda zásah větší prachovou částicí, což vychýlilo sondu natolik, že následujících 32 minut byl kontakt se sondou navázán jen přerušovaně (Reinhard 1986). Ve stejnou dobu také přerušila činnost kamera HMC, když se resetoval jeden z jejích mikroprocesorů (Keller
et al 1987). Z nepříliš zřejmých důvodů byly poškozeny již tři sady snímků před ukončením činnosti HMC, takže nakonec nejlepší publikovaný snímek byl pořízen ze vzdálenosti 1936 km od komety. I Giotto bojovala s omezeními danými pomalým přenosem dat v reálném čase a tak snímky z kamery HMC byly velmi malé, ke konci přenosu měly jen 74×74 pixelů.
Přestože snímky z HMC umožňují tvorbu barevných snímků, nepamatuji se, že bych někde takový viděl. Většina publikovaných snímků je založena na černobílých kompozicích a teprve dodatečně obarvena falešnými barvami. Dokonce ani oficiální zdroje jako je třeba Keller et al 1987 neukazují žádný snímek vytvořený z filtrovaných snímků.
Zřejmě jediný barevný snímek, který ukazuje celou kometu, jsem udělal už před mnoha lety pro fórum
unmannedspaceflight. Ten je také založený na dodatečně obarvené černobílé kompozici několika desítek snímků (z Keller
et al 1992), ale barva je založená na reálných snímcích s nižším rozlišením, pořízených přes červený, modrý a čistý filtr. Upravený snímek je vidět na obrázku 3. Snímek je upraven pomocí automatického vyvážení bílé a je zmenšen na rozlišení 50 m/pix.
Jak je vidno, barvy jsou velmi nevýrazné, kometa je většinou šedivá. Musím však upozornit na to, že tento obrázek jsem vytvářel ještě v 8-mi bitovém barevném prostoru, domnívám se, že vyspělejší metody zpracování mohou přinést podstatně lepší výsledky.
 |
Obrázek/Figure 4. Comet Wild 2 from the Stardust spacecraft.
Two best images (n2073 and n2075) of the 81P/Wild 2 comet taken by navigation camera onboard Stardust spacecraft (NASA).
Source images were taken 2.1.2004 at 19:21:28 and 19:21:48 UTC through OPNAV filter from.
distance 237 and 257 km from the comet (Carcich et al 2014).
Images were resampled to 10 m/pix resolution (originally 14 and 15 m/pix).
Credit: NASA / JPL-Caltech / Daniel Macháček.
|
Po problematickém setkání s Halleyovou kometou prolétla sonda Giotto ještě 10. července 1992 pouhých ~100 km od komety
26P/Grigg-Skjellerup (Le Duin
et al 1996, McBride
et al 1997). Kameru HMC se bohužel rozchodit nepodařilo, poškození z průletu Halleyovy komety se ukázala jako příliš vážná a průlet se tedy musel obejít bez snímků.
Pak následovala téměř desetiletá pauza a to až do 22. září 2001, kdy prolétla americká experimentální sonda
Deep Space 1 ve vzdálenosti 2171 km okolo komety
19P/Borrelly. Sonda měla problémy s naváděním na kometu, kterou se i za cenu rozmazání některých snímků, nakonec dařilo udržet v záběru palubní kamery MICAS až do vzdálenosti 3556 km. Blíže se už jádro dostalo mimo záběr. Nakonec sonda pořídila (na svou dobu) kvalitní snímky, ale jen černobíle (viz obr.1 vpravo), protože kamera postrádala barevné filtry. Hlavním cílem sondy přece jen nebyl v prvé řadě průzkum komet, ale zkouška technologických novinek, z nichž nejdůležitější byl iontový pohon pro meziplanetární lety.
Jestliže Deep Space 1 si jen tak mimochodem zalétla i ke kometě, další sonda byla speciálně "vyšlechtěna" pro průzkum komet. 3. července 2002 odstartovala americká sonda
CONTOUR a očekávalo se od ní, že navštíví v následujících letech
Enckeho kometu (2P/Encke) a komety
73P/Schwassmann–Wachmann a
6P/d'Arrest. Na palubě byly mimo jiné i dvě barevné kamery schopné pořídit záběry s rozlišením 4 metry na pixel při průletech ve vzdálenostech okolo 100 km.
15. srpna se zažehl motor na tuhá paliva, který měl sondu navést na meziplanetární dráhu a od té doby se už sonda neozvala. Později se podařilo ze Země identifikovat tři tělesa, která byla tím jediným, co zůstalo po této nadějné misi.
2. ledna 2004 další americká sonda
Stardust prolétla jen 237 km od divoce vyhlížející komety
81P/Wild 2. Kromě zařízení na první odběr vzorků z kometární komy nesla na palubě také periskopickou kameru, tentokráte vybavenou sadou barevných filtrů.
Bylo by nicméně omylem se domnívat, že smůla potkává jen mise euroasijského původu. V kameře se ještě před průletem zaseklo karuselové kolo s barevnými filtry a bylo štěstí v neštěstí, že se tomu tak stalo alespoň v pozici obsahující širokopásmový filtr. Z barevného snímkování tak naneštěstí sešlo. Na obrázku 4 jsou dva nejlepší snímky, n2073 a n2075, komety Wild 2 zvětšené na rozlišení 10 metrů na pixel (původně 14 a 15 m/pix) (Veverka
et al 2011). Myslím, že se dá úspěšně argumentovat, že kometa Wild 2 (wild znamená v angličtině mimojiné divoký, či bláznivý) skutečně dělá čest svému jménu. Rozvrstvený terén plný skalisek a hlubokých děr neměl obdoby až do příletu Rosetty ke kometě 67P.
 |
Obrázek/Figure 5. Comet 9P/Tempel 1 from the Deep Impact spacecraft.
Best global color image of the 9P/Tempel 1 comet taken by MRI camera onboard Deep Impact spacecraft (NASA).
It's made from three images taken 4.7.2005 between 5:56:25 and 5:56:42 UTC from distance between 1509 and 1344 km through
IR (9001031), green (9001029) and violet (9001034) filters (McLaughlin et al 2014). Color is enhanced and spectrally extended beyond human vision. Resolution is ~14.5 m/pix.
Credit: NASA / JPL-Caltech / UMD / Daniel Macháček.
|
Na první skutečně kvalitní barevné snímky jádra komety jsme museli čekat až do 4. července 2005, kdy 500 km od Tempelovy komety (
9P/Tempel 1) prolétla americká sonda
Deep Impact. Součástí sondy byl navíc i tzv. Impactor, který po oddělení narazil do komety rychlostí 10,3 km/s.
Impactor nesl na palubě jen navigační černobílou kameru ITS, ale mateřská sonda nesla na palubě hned dvě barevné kamery - jednu se středním (MRI) a druhou s vysokým rozlišením (HRI). Obě byly vybavené sadou výměnných filtrů v karuselovém kole.
Dvojice kamer se ukázala být prozíravým řešením. Zatímco jedna z kamer, MRI, fungovala na jedničku, druhou kameru HRI potkal obdobný osud jako v případě kamer TVS sondy VeGa-1. Ukázalo se, že snímky jsou výrazně rozostřené a to až do té míry, že jejich rozlišení nebylo v praxi o moc lepší než u kamery MRI, která má přitom papírově jen 5× nižší rozlišení.
Nejlepší celkový barevný pohled na jádro Tempelovy komety tak nakonec nabídla právě kamera MRI ze vzdálenosti ~1400 km a můžete si jej prohlédnout na obrázku 5. Obrázek je složen ze tří snímků pořízených přes infračervený, zelený a fialový filtr (snímky 9001029, 9001031 a 9001034) a barvy tak pokrývají rozšířenou oblast spektra oproti tomu, co by viděl lidský zrak. Rozlišení je přibližně 14 metrů na pixel (McLaughlin
et al 2014). Celému výjevu dominuje fontána prachu vyvržená při dopadu Impactoru do komety. Samotná kometa je zbarvena do červena s výjimkou občasných namodralých oblastí.
Deep Impact nesl na palubě také mapovací infračervený spektrometr HRI-IR a tak bylo možné analýzou spekter později zjistit, že namodralý odstín je způsoben špetkou (3-6%) vodní ledu (Sunshine
et al 2006). Jinak se povrch komety ukázal jako extrémně vysušený a jeho složení palubní spektrometr odhalit nedokázal. Možné vysvětlení spočívá v chemické komplikovanosti povrchu, který je zřejmě velmi stejnorodou směskou tolika různých organických a anorganických materiálů, že na to spektrometr s relativně nízkým rozlišením prostě nestačí. O chemické bohatosti kometárního jádra víme díky Impactoru mise, jehož srážka s jádrem komety nebyla jen úžasným divadlem, ale v prvé řadě vědeckým experimentem. Materiál vyvržený dopadem byl podrobně analyzován jak palubním spektrometrem, tak řadou přístrojů na zemi i ve vesmíru (viz třeba Lisse
et al 2007 nebo A´Hearn
et al 2006).
 |
Obrázek/Figure 6. Comet 103P/Hartley 2 from the Deep Impact spacecraft.
Best color image of the 103P/Hartley 2 comet taken by HRI camera onboard Deep Impact/EPOXI spacecraft (NASA).
It's made from three images taken 4.11.2010 between 13:49:45 and 13:50:00 UTC from distance between 7458 and 7218 km through
IR (5002035), green (5002037) and blue (5002038) filters (Lindler et al 2012). Color is enhanced and spectrally extended beyond human vision.
Resolution is 14.5 m/pix.
Credit: NASA / JPL-Caltech / UMD / Daniel Macháček.
|
V dalších letech dostala Tempelova kometa druhou návštěvu v podobě mise Stardust-NExT, která využila vysloužilou sondu Stardust, poté co už splnila úkol dovézt na zemi vzorky od komety Wild 2.
15. února 2011
proletěla ve vzdálenosti 182 km od jádra, pořídila úspěšně snímky kráteru vytvořeného Impactorem mise Deep Impact a nafotila i doposud nezmapované části komety. Vše ale jen černobíle.
Ale i pro dalšího amerického veterána, sondu Deep Impact, se našlo další využití a v rámci prodloužené mise EPOXI jí byl jako cíl vybrána kometa
85D/Boethin. Později se ovšem přišlo na to, že nešťastná kometa Boethin není k nalezení a zřejmě se již dávno rozpadla. Deep Impact byl tak nakonec naveden k záložnímu cíli - kometě
103P/Hartley 2. Kolem ní proletěla sonda 4. listopadu 2010 ve vzdálenosti 694 km.
Palubní kamery odhalily malé (viz obr. č.1 vlevo), ale velmi aktivní jádro, obklopené množstvím chuchvalců prachu a ledu poletujících okolo komety (viz článek "
Animace komety Hartley 2").
Obě kamery na palubě, MRI i HRI, pořídily sadu záběrů z celého průletu a to i v barvě.
Barevné záběry je třeba u rychlých průletů okolo komety (či planetky) pořídit z většího odstupu od cíle, v době kdy se jádro na záběru ještě příliš nemění, protože jinak by byl problém snímky pořízené přes různobarevné filtry složit.
Když Deep Impact zkoumal Tempelovu kometu, nebyl to takový problém, protože jádro je relativně velké. Hartley 2 je ale maličká kometa a při snímkování přes filtry ze vzdálenosti 4600 km měla na čipu kamery MRI rozměry jen 47×12 pixelů při rozlišení 46 metrů na pixel. A to navíc jen při odletu, při příletu se barevné snímky rozmázly. Druhá kamera HRI měla sice teoreticky vyšší rozlišení, ale nebyla s to pořídit ostré snímky.
Jak z toho ven?
Tým kamer nakonec přišel s řešením spočívajícím v použití
dekonvoluce na rozmazané snímky.
Tato metoda dokáže, teoreticky, odstranit rozmazání obrazu, pokud víme jak se přesně snímek rozmázl. Míra a typ rozmazání se zpravidla zjišťuje snímkováním bodových zdrojů, v kosmickém prostoru jsou k tomu vhodné například hvězdy.
Díky dekonvoluci se nakonec podařilo podstatně zvýšit kvalitu snímků z kamery HRI a výsledek si můžete prohlédnout na obrázku 6. Ten je složen ze snímků pořízených přes infračervený, zelený a modrý filtr (snímky 5002035, 5002037 a 5002038) s rozlišením 14,5 metru na pixel (Lindler
et al 2012). Obdobně jako u Tempelovy komety, je na výsledných barevných kompozicích vidět načervenalý vysušený povrch jádra s namodralými oblastmi oblastmi s výskytem vodního ledu.
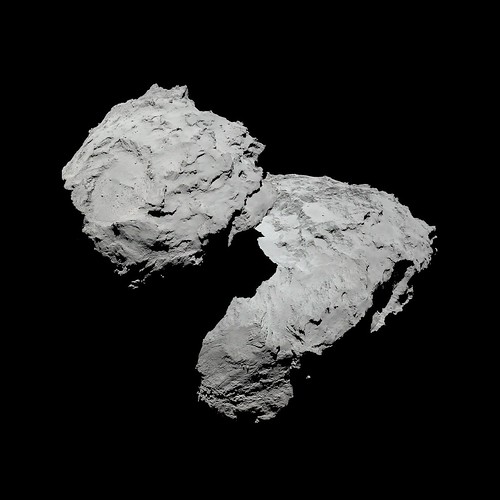 |
Obrázek/Figure 7. Comet 67P/Churyumov-Gerasimenko from the Rosetta spacecraft in natural colors.
Approx. natural color image of the 67P/Churyumov-Gerasimenko comet taken by OSIRIS NAC camera onboard Rosette spacecraft (ESA).
It's made from three images taken 5.8.2014 between 23:20:23 and 23:20:45 UTC from distance 123 km through
orange (N20140805T231914571ID30F22), green (N20140805T231925571ID30F23) and blue (N20140805T231936781ID30F24) filters
(Gutierrez-Marques et al 2017).
Resolution is 2.3 m/pix.
Credit: ESA / MPS / UPD / LAM / IAA / RSSD / INTA / UPM / DASP / IDA / Daniel Macháček.
|
Po misi Deep Impact/EPOXI už celá odborná veřejnost nedočkavě a s napětím čekala na přílet Rosetty ke kometě 67P/Čurjumov-Gerasimenko. V té době již dvanáct let stará sonda zahájila během roku 2014 sérii brzdných manévrů, které jí nakonec úspěšně navedly 10. září na oběžnou dráhu okolo komety.
Ale už před tím sonda pořizovala snímky během svého přibližování ke kometě, přičemž jádro samotné bylo na snímcích dobře patrné už během července.
Před Rosettou se postupně zjevovalo těleso jak vytržené z nějakého Hollywoodského spektáklu, překonávající i šílenou kometu Wild 2.
Modely založené na pozorování Hubbleovým teleskopem sice ukazovaly na docela hranaté těleso, ale skutečnost dalece překonala všechna očekávání. Kamery ukázaly kometu 67P jako binární těleso vzhledem připomínající plastovou kachničku, s povrchem rozbrázděným nesčetnými útesy, skalami, srázy a dokonce i propastmi. Čím víc se sonda přibližovala, tím úžasnější detaily byly vidět. Nakonec se sonda počátkem srpna dostala natolik blízko, že kometa na snímcích úzkoúhlé kamery zabrala většinu zorného pole.
Na obrázcích 7 a 8 si můžete prohlédnout kometu v celé její kráse, jak ji v tu chvíli (5. srpna) zachytila kamera OSIRIS NAC ze vzdálenosti 123 kilometrů při rozlišení 2,3 metru pixel. Obrázek 7 představuje kometu blízko tomu, jak by ji viděl lidský zrak. Je složen ze tří snímků pořízených přes oranžový (N20140805T231914571ID30F22), zelený (N20140805T231925571ID30F23) a modrý filtr (N20140805T231936781ID30F24). Oproti různorodým tvarům povrchových útvarů je barva komety nevýrazně šedivá s jen nepatrnými nádechy barevných odstínů.
Pokud ovšem poněkud rozšíříme spektrální rozsah, zvýšíme kontrast a sytost barev, výsledek bude vypadat jako na obrázku 8. Je složen ze dvou stejných snímků jako předchozí, ale oranžový snímek nyní nahradil infračervený (N20140805T232011041ID30F41), oranžový nahradil zelený a modrý zůstal. Stejně jako v případě Tempelovy komety a komety Hartley 2 se nyní jeví jádro jako načervenalé, byť s jiným odstínem a vidíme zde i oblasti namodralé, obsahující vodní led.
Tyto snímky vznikly na samém počátku celého průzkumu komety 67P sondou Rosetta a v následujích více než dvou letech pořídily kamery OSIRIS přes
76 000 snímků, dokumentujících celé dobrodružství mise v úžasných detailech. A to bude předmětem příštích dílů této minisérie.
 |
Obrázek/Figure 8. Comet 67P/Churyumov-Gerasimenko from the Rosetta spacecraft in enhanced colors.
Image of the 67P/Churyumov-Gerasimenko comet taken by OSIRIS NAC camera onboard Rosette spacecraft (ESA).
It's made from three images taken 5.8.2014 between 23:20:23 and 23:21:20 UTC from distance between 123 km through near-IR (N20140805T232011041ID30F41), orange (N20140805T231914571ID30F22) and blue (N20140805T231936781ID30F24) filters (Gutierrez-Marques et al 2017). Color is enhanced and spectrally extended beyond human vision.
Resolution is 2.3 m/pix.
Credit: ESA / MPS / UPD / LAM / IAA / RSSD / INTA / UPM / DASP / IDA / Daniel Macháček.
|
Update (22.12.2018):
Obrázek č.1 nyní obsahuje nejnovější kometu
zobrazenou radarem observatoře v Arecibu - 46P/Wirtanen, což byl mimojiné původní cíl sondy Rosetta, než byl její start z technických důvodů odložen.
Reference:
(Abergel
et al 1987)
Abergel, A., Bertaux, J. L., & Dimarellis, E. (1987, September). Image processing on VEGA pictures. In Diversity and Similarity of Comets (Vol. 278).
(Abergel
et al 1997)
Abergel J., Bertaux G., Avanessov G.A., Tarnopolsky V.I., Zhulov B.S., Kondor A., Merenyi E., Foldy C., Szego K., Toth I., and A. V. Dyachkov, VEGA2 TV SYSTEM IMAGES PROCESSED BY KFKI V1.0, VEGA2-C-TVS-3-RDR-HALLEY-PROCESSED-V1.0, NASA Planetary Data System, 1997
(A´Hearn
et al 2006)
A’Hearn, M. F., Belton, M. J. S., Delamere, W. A., Kissel, J., Klaasen, K. P., McFadden, L. A., ... & Thomas, P. C. (2006). Deep Impact: Excavating Comet Tempel 1. Science, 14.
(Carcich
et al 2014)
Carcich, B.T., et al., STARDUST NAVCAM CALIBRATED IMAGES OF 81P/WILD 2 - VERS 3.0, SDU-C-NAVCAM-3-RDR-WILD2-V3.0, NASA Planetary Data System, 2014.
(Dimarellis
et al 1989)
Dimarellis, E., Bertaux, J. L., & Abergel, A. (1989). Restoration of Vega-1 pictures of the nucleus of comet P/Halley-A new method revealing clear contours and jets. Astronomy and Astrophysics, 208, 327-330.
(Gutierrez-Marques
et al 2017)
Gutierrez-Marques, P., Sierks, H. and the OSIRIS Team, ROSETTA-ORBITER PRELANDING OSINAC 3 RDR MTP006 V2.0, RO-C-OSINAC-3-PRL-67PCHURYUMOV-M06-V2.0, ESA Planetary Science Archive and NASA Planetary Data System, 2017.
(Keller
et al 1987)
Keller, H. U., Delamere, W. A., Huebner, W. F., Reitsema, H. J., Schmidt, H. U., Whipple, F. L., ... & Arpigny, C. (1988). Comet P/Halley’s nucleus and its activity. In Exploration of Halley’s Comet (pp. 807-823). Springer, Berlin, Heidelberg.
(Keller
et al 1992)
Keller, H. U., N. Thomas, W. Curdt, and G. Schwarz, GIOTTO HALLEY
MULTICOLOR CAMERA IMAGES V1.0, GIO-C-HMC-3-RDR-HALLEY-V1.0, NASA
Planetary Data System, 1992
(Le Duin
et al 2006)
Le Duin, T., Crifo, J. F., Le Queau, D., & Crifo, F. (1996). A quantitative interpretation of the in-situ observations of the dust coma of comet P/Grigg-Skjellerup by the OPE photopolarimeter. Astronomy and Astrophysics, 308, 261-272.
(Lindler
et al 2012)
Lindler, D.J., M.F. A'Hearn, and S.A. McLaughlin, EPOXI 103P/HARTLEY2 ENCOUNTER - HRIV DECONVOLVED IMGS V1.0, DIF-C-HRIV-5-EPOXI-HARTLEY2-DECONV-V1.0, NASA Planetary Data System, 2012.
(Lisse
et al 2007)
Lisse, C. M., Kraemer, K. E., Nuth III, J. A., Li, A., & Joswiak, D. (2007). Comparison of the composition of the Tempel 1 ejecta to the dust in Comet C/Hale–Bopp 1995 O1 and YSO HD 100546. Icarus, 191(2), 223-240.
(McBride
et al 1997)
McBride, N., Green, S. F., Chantal Levasseur-Regourd, A., Goidet-Devel, B., & Renard, J. B. (1997). The inner dust coma of Comet 26P/Grigg-Skjellerup: multiple jets and nucleus fragments?. Monthly Notices of the Royal Astronomical Society, 289(3), 535-553.
(McLaughlin
et al 2014)
McLaughlin, S.A., B. Carcich, S.E. Sackett, T. McCarthy, M. Desnoyer, K.P. Klaasen, and D.W. Wellnitz, DEEP IMPACT 9P/TEMPEL ENCOUNTER - REDUCED MRI IMAGES V3.0, DIF-C-MRI-3/4-9P-ENCOUNTER-V3.0, NASA Planetary Data System, 2014.
(Reinhard 1986)
Reinhard, R. (1986). The Giotto encounter with Halley's Comet-First scientific results. ESA Journal, 46, 52-57.
(Sunshine
et al 2006)
Sunshine, J. M., A'hearn, M. F., Groussin, O., Li, J. Y., Belton, M. J. S., Delamere, W. A., ... & Melosh, H. J. (2006). Exposed water ice deposits on the surface of comet 9P/Tempel 1. Science, 311(5766), 1453-1455.
(Thomas 2004)
Thomas, N. (2004). In situ observations of cometary nuclei. Comets II, 211.






















{kind=link}
{kind=link}